
Olá, pessoal! Tudo bem? Hoje, iremos projetar e simular controladores para um veículo diferencial, que serão responsáveis por fazê-lo seguir uma linha definida em um plano. Para isso, usaremos o Octave, uma linguagem computacional desenvolvida para computação matemática e que possui compatibilidade com MATLAB. Você pode fazer o download do executável do Octave clicando aqui.
Uma breve introdução teórica
Um robô diferencial possui 2 rodas tracionadas independentemente e um ou mais pontos de contato. A única forma de atuação em um robô diferencial é pela imposição de velocidades independentes em cada roda. Neste experimento, faremos um robô móvel diferencial seguir uma linha no plano definido por ax + by + c = 0.
Para isso, serão necessários dois controladores para ajustar a direção do veículo. Um dos controladores será responsável por “dirigir” o robô para minimizar a distância normal dele até a linha, de acordo com a equação:
Onde d é a distância normal do robô até a linha. Temos, então, o nosso primeiro controlador:
O segundo controlador ajusta o ângulo de orientação do veículo, para que ele fique paralelo à linha, de acordo com a equação:
Temos, então, o nosso segundo controlador:
Combinando as equações dos dois controladores, temos a nossa lei de controle do veículo:
Agora, vamos ao código!
Função de simulação do veículo diferencial
Precisaremos de uma função que simule o veículo diferencial com o qual trabalharemos. No Octave, criaremos um arquivo chamado vehicle_diff.m, no qual iremos definir esta função, adicionando características do veículo, como o ruído nas rodas, amplitude, espaço entre as duas rodas, etc.
function [P1, vr, wr] = vehicle_diff(P0, v, w, ts)
% funcao que simula um robo diferencial
% P0 = [x; y; theta] posicao atual do robo
% P1 = [x1; y1; theta1] posicao apos aplicar os sinais de controle
% v = velocidade de referencia linear [m/s]
% w = velocidade de referencia angular [rad/s]
% vr = velocidade do robo linear [m/s]
% wr = velocidade do robo angular [rad/s]
% wd = velocidade angular da roda direita
% we = velocidade angular da roda esquerda
% ts = periodo de amostragem [s]
% l = espaco entre as duas rodas [m]
% r = raio das rodas [m]
l = 0.09;
r = 0.05;
% Adicao de ruido na leitura das velocidades
V = [v w]';
T = [r/2 (r + 0.002)/2; r/l -(r+0.002)/l];
W = inv(T)*V; % W = [wd we]'
wd = W(1);
we = W(2);
% Velocidades estimadas
Vest = T*[wd we]';
vr = Vest(1);
wr = Vest(2);
% Matriz de rotacao
theta = P0(3);
R = [cos(theta) 0; sin(theta) 0; 0 1];
% A posicao P1 eh a posicao atual mais a evolucao no espaco global
P1 = P0 + R * (Vest * ts);
end
Implementando os controladores
Criaremos agora um arquivo chamado navigation_controller.m, no qual iremos implementar os nossos dois controladores de acordo com as equações apresentadas acima. Aqui, também iremos atualizar os estados do robô.
% Template
% P0 = posicao inical do robo
% P1 = posicao estimada
% x,y,theta = trajetoria do robo
% i = amostras
% vref = velocidade de referencia linear do centro de massa do robo
% wref = velocidade de referencia angular do centro de massa do robo
% vrobo = velocidade linear do robo [m/s]
% wrobo = velocidade angular do robo [rad/s]
% Kd = Constante de Ganho
% Kh = Constante de H
% compWheel = Comprimento Roda Veiculo
% Define posicao inicial do robo
P0 = [0 0 pi/2]';
P1 = P0;
i = 1;
x(i) = P0(1);
y(i) = P0(2);
theta(i) = P0(3);
% Velocidade de referencia
vref = 0.4;
% Amostragem
ts = 0.1;
% Parametros da linha
L = [1 -2 4];
% Constante de Ganho
Kd = 0.1;
% Constante de H
Kh = 0.8;
% Comprimento da roda Veiculo
compWheel = 0.1;
while (i < 500) % navegando por 60 segundos
d = (L(1) * x(i) + L(2) * y(i) + L(3)) / sqrt((L(1))^2 + (L(2))^2);
diffAng = angdiff(atan2(-L(1), L(2)), theta(i));
gama = (-Kd * d) + (Kh * diffAng);
%Calculando velocidade angular de referencia
wref = (vref / compWheel) * (tan(gama));
% Funcao que simula o veiculo diferencial
[P1, vr, wr] = vehicle_diff(P0, vref, wref, ts);
i = i + 1;
% Atualiza estado
P0 = P1;
% Logs da trajetoria
x(i) = P1(1);
y(i) = P1(2);
theta(i) = P1(3);
vrobo(i) = vr;
wrobo(i) = wr;
ghama(i) = gama;
end
plot_navigation;
Plotando a trajetória do veículo
Agora criaremos o arquivo plot_navigation.m, para visualizarmos a trajetória do nosso robô, assim como suas velocidades linear e angular e sua angulação.
plotsize = 10;
xmin = -plotsize;
ymin = -plotsize;
xmax = plotsize;
ymax = plotsize;
% Plota linha
alpha = -(L(1)/L(2));
beta = -(L(3)/L(2));
t = -20:0.1:15;
f = alpha*t+beta;
% Plotando trajetoria do robo
figure
plot(x,y,'bo');
hold on;
plot(x,y,'r-');
title('Trajetoria de robo diferencial');
xlabel('x (m)');
ylabel('y (m)');
plot(t,f,'r');
% Plotando angulo do robo em radianos
figure
plot(theta,'r-x');
xlabel('amostras');
ylabel('theta (rad)');
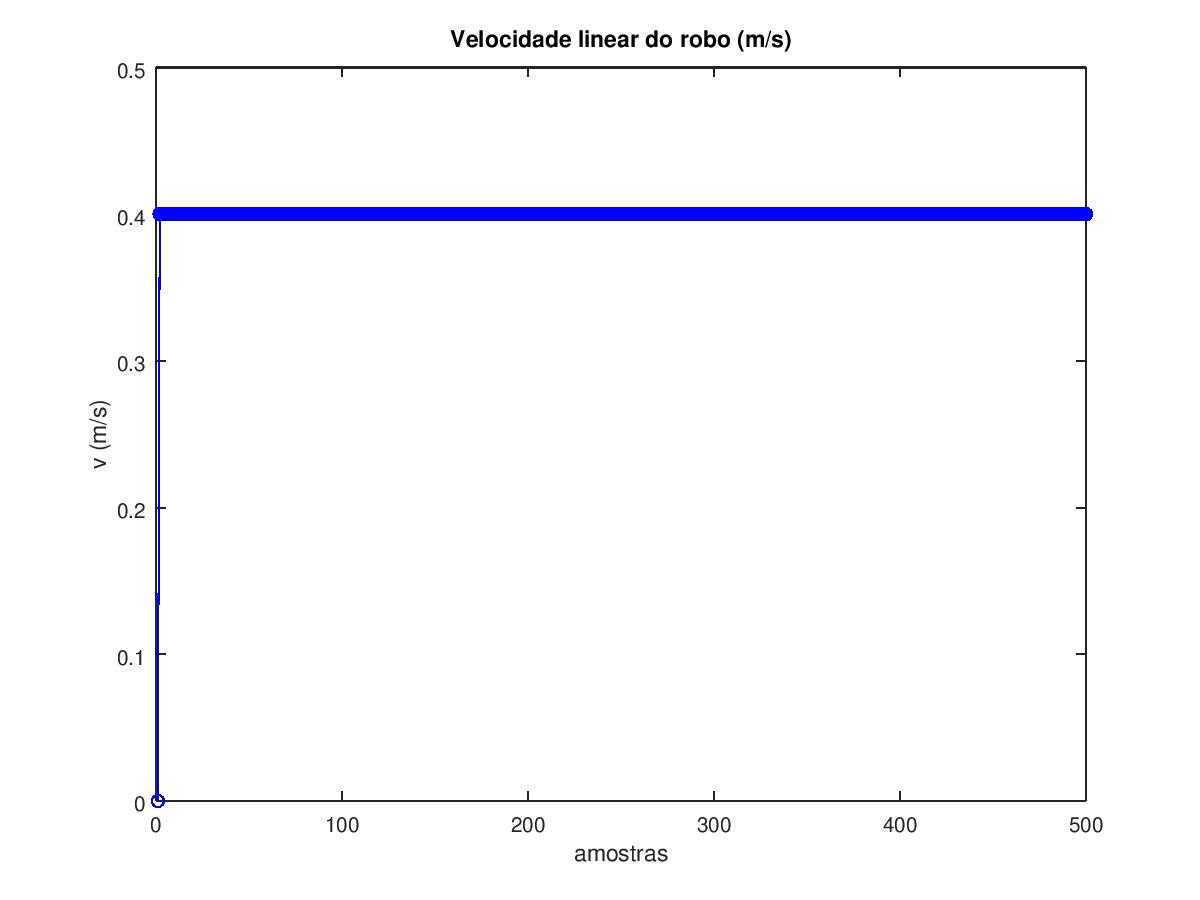
% Plotando velocidade linear robo em m/s
figure
plot(vrobo,'b-o');
xlabel('amostras');
ylabel('v (m/s)');
% Plotando velocidade angular do robo em rad/s
figure
plot(wrobo,'b-o');
xlabel('amostras');
ylabel('w (rad/s)');
Executando o código
Podemos executar nosso código pelo terminal do Octave, simplesmente digitando o nome do arquivo que queremos executar, neste caso, o navigation_controller. Não é necessário digitar o nome do arquivo com a extensão .m. Vamos aos resultados!
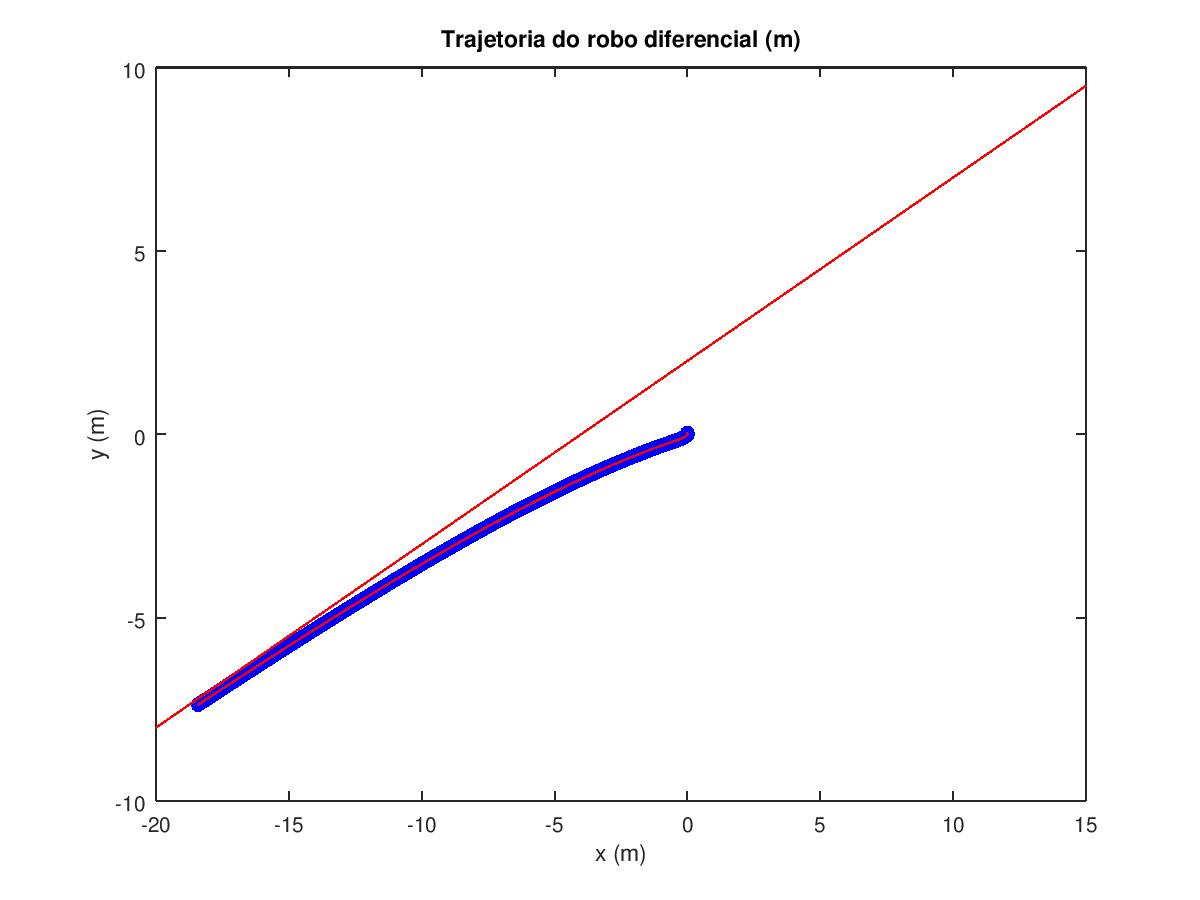
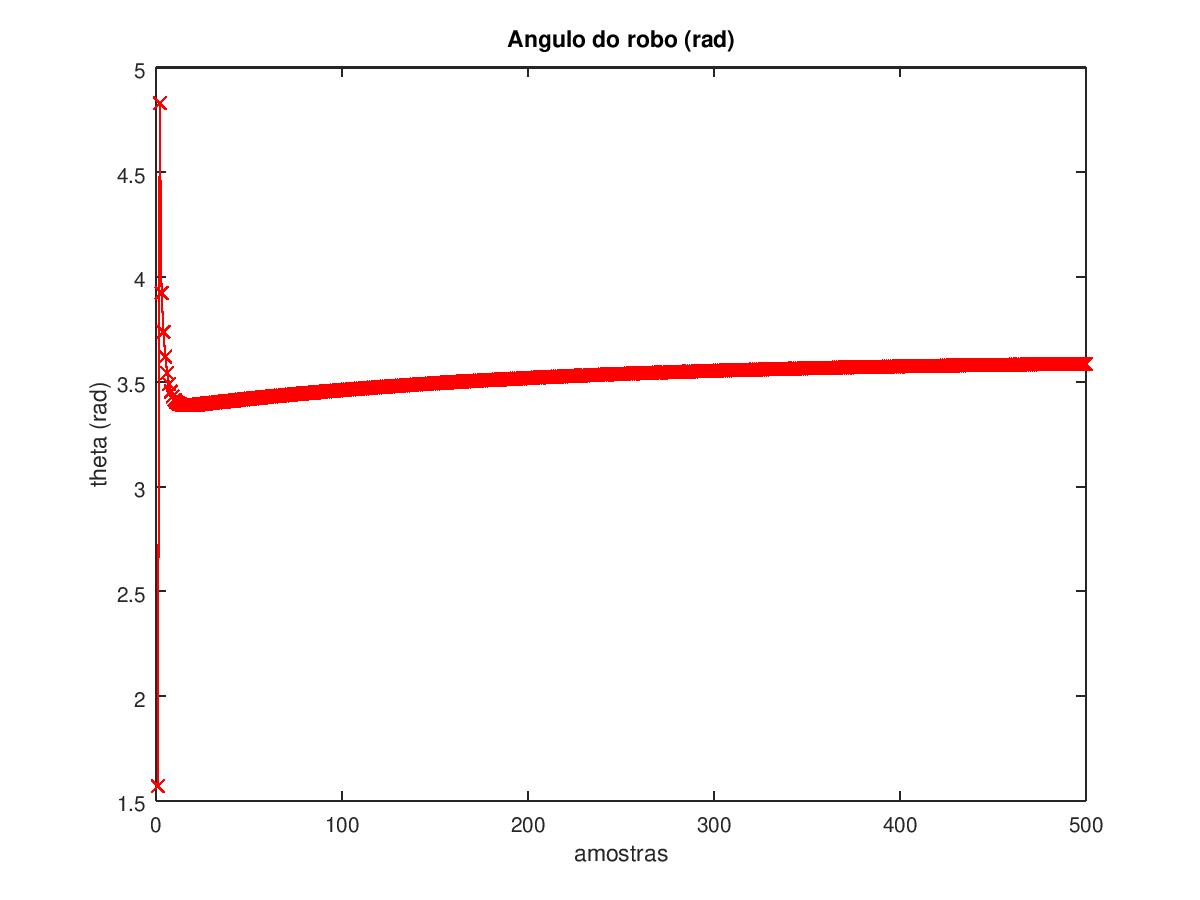
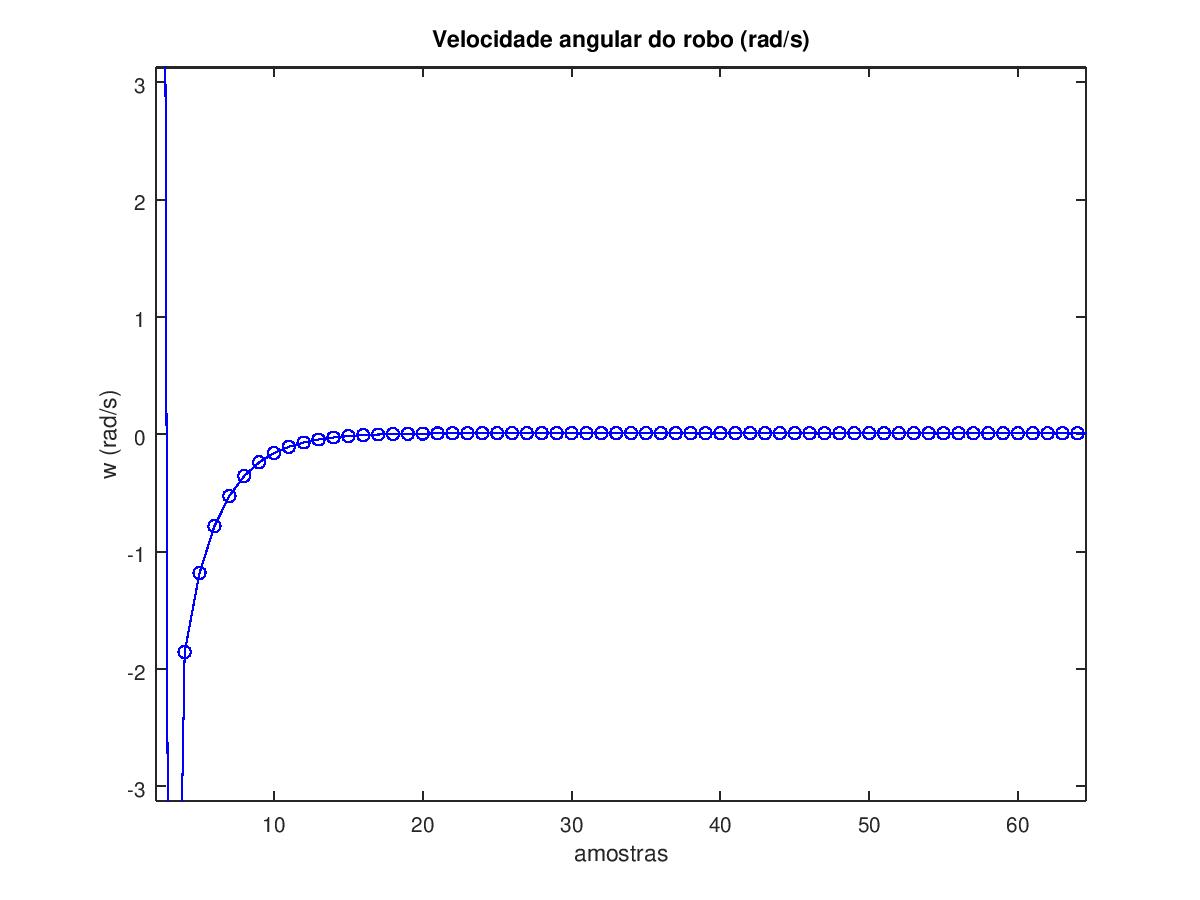
Como podemos ver, à medida que o robô se aproxima da linha, sua velocidade angular vai se tornando mais estável e tendendo a zero. Após aproximadamente 20 amostras, o robô consegue se guiar sobre a linha que foi definida!
Se quiserem se aprofundar um pouco mais nesta experiência, podem consultar o livro do Peter Corke “Robotics, Vision and Control – Fundamental Algorithms in Matlab”. O método Following a line é apresentado a partir da página 72 do livro, na seção 4.2.2.
Espero que tenham gostado! Até o próximo post! 💕